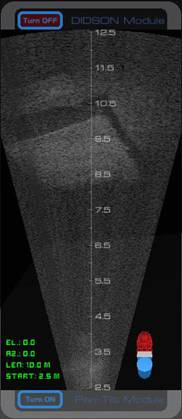
The DIDSON sonar


One of the most important objectives in the SAUVIM missions is the capability of identifying the environment and the target in many different settings.
We are addressing this issue with the use of the DIDSON sonar (from Soundmetrics), mostly employed for medium range exploration and target identification and localization.
Within the SAUVIM control architecture, a custom Ethernet communication protocol has been developed for the DIDSON module, based on the SAUVIM standard xBus, and allowing to perform remotely parameter setting, sensor control and management and data acquisition.
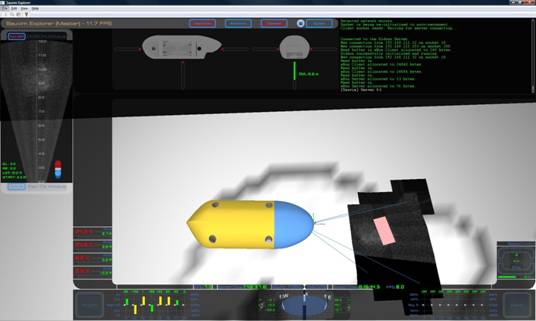
Data from the DIDSON are collected within the Sauvim Explorer interface and, with the aid of the real-time position data from the PHINS module, are mapped directly on the terrain (elevation data are collected using the IMAGENEX, DVL and pingers).
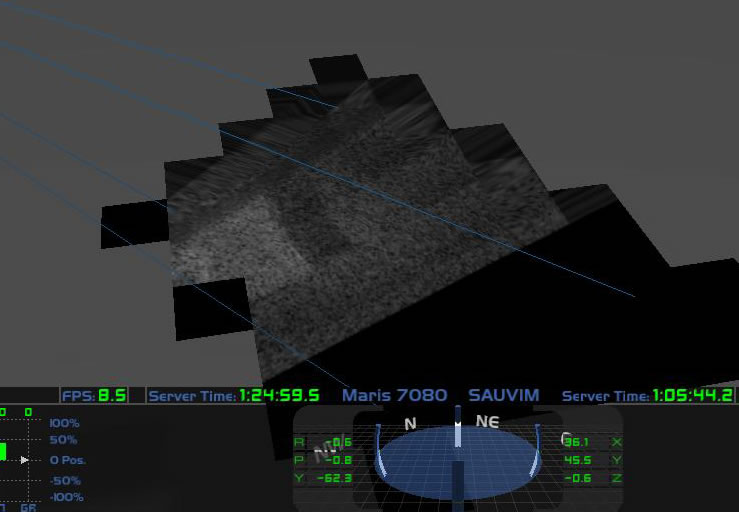
This enhances the potentialities of SAUVIM, allowing a visual mapping of the underwater environment, similarly to what is currently done with satellite imageries for the land (see for example Google Earth).
Target Identification
 Another important feature of SAUVIM is the capability of performing identification and localization of known submerged objects for guiding the vehicle to approach such target. It consists in recognizing known submerged objects, in computing their absolute position and in using this information in the SAUVIM navigation control loop so the vehicle can autonomously moves to the detected target.
Another important feature of SAUVIM is the capability of performing identification and localization of known submerged objects for guiding the vehicle to approach such target. It consists in recognizing known submerged objects, in computing their absolute position and in using this information in the SAUVIM navigation control loop so the vehicle can autonomously moves to the detected target.
In order to use the DIDSON has a regular camera for bottom exploration and known objects identification, two main problems have to be considered:
- Object shape deformation due to the DIDSON beam features
- Environmental noise that affects acoustic signal propagation, so DIDSON acoustic return acquisition
To deal with the first problem, a recursive model estimator has been implemented: at a fixed frequency, a Cartesian model of the target is built according to object dimension (a-priori information) and DIDSON orientation (thanks to the inertial navigation system and the pan and tilt modules on board SAUVIM vehicle). So a fictitious DIDSON image is created: it is an estimation of the object Cartesian image by DIDSON view point. Maximum (white color) acoustic reflection from the object surface, no reflection (black color) from the object edge and average reflection (gray) from the background are the object model hypothesis.
Then, for the target identification, standard image processing edge detection techniques cannot be used due to the shape deformation and environmental acoustic noise: so statistical, bi-dimensional convolution based, approach via Intel Math Kernel Library (MKL), that guarantees high performance for real time application, has been implemented.
This capability of identifying and mapping know objects is extremely important for security missions, like for example in harbor surveillance.