Position Sensors
SAUVIM collects navigation data from different sensors source:
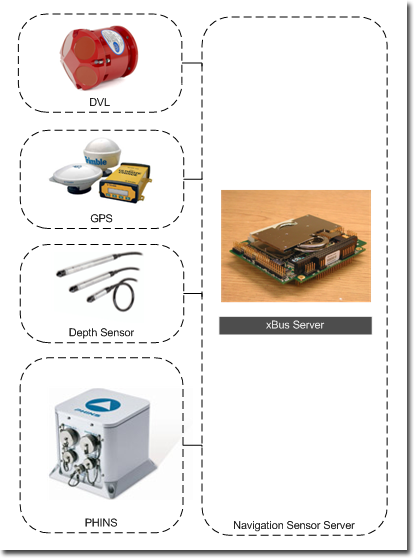
DGPS data. The position from the DGPS sensor is absolute, with an accuracy of about a meter.
DVL data. The DVL provides accurate velocity with respect to the bottom. However, these velocities must be integrated using mainly the heading information.
Depth Sensor. The Depth Sensor measures the water pressure information at the given depth, with an accuracy depending by its range (~1 cm in the actual implementation).
PHINS. PHINS is an Inertial Navigation System which provides true-heading, attitude, speed and position. PHINS includes a high-level inertial heart based on Fiber-Optic Gyroscopes coupled to an embedded digital signal processor that runs a Kalman filter specially developed for marine applications. PHINS’ Kalman filter holds GPS hybridation for surface alignment purpose.
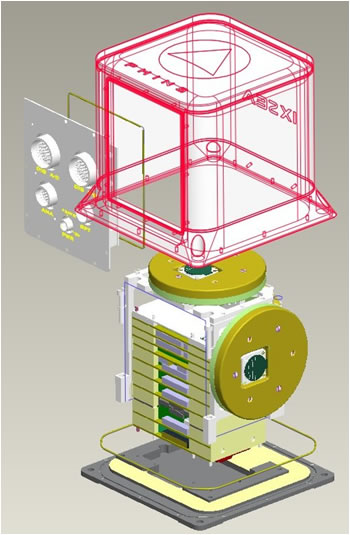
More information on the the PHINS can be fount on the IXSEA website.
Last Update: December 21, 2013 11:06 AM