xSense: Ultrasonic Motion Tracker
SAUVIM uses a new sensor device for target localization: an ultrasonic motion tracker used to retrieve the real-time 6 DOF position of the target during a generic manipulation tasks.
The realized device utilizes high frequency sound waves to track a probe containing an array of ultrasonic receivers. The use of 4 transmitters at the stationary positions with 4 receivers on the probe can be used to determine the 6 DOF generalized position (rotation and translation) of the object.
The commercially available motion trackers are mostly developed for virtual reality purposes (for instance in capturing the body movements) or medical use (i.e. for tracking the position of probes). However, the underwater environment lacks of devices for high definition measurement of generalized position (translation and rotation) to be employed in robotic tasks.
Hydroacoustic Position Reference systems (HPRs) are set to provide positioning information mostly for navigation purpose, with an accuracy targeted to the requirements of the navigation task. HPR systems include Ultra- or Super- Short Base Line (USBL or SSBL), Long Base Line (LBL) and Short Base Line (SBL). While the information provided by the above system is generally excellent for navigation purpose, it is usually insufficient to measure the position of a target for a robotic intervention task. In fact, the most distinguishing features required in an underwater robotic intervention are:
This underwater tracking technology can be also used in different situation as for example in precision vehicle docking/undocking procedures. The xSense device for SAUVIM, designed by Giacomo Marani, may achieve an accuracy that exceed most underwater tasks specifification, as shown in the following distribution of 1000 measurements around their mean values.
![]()
In order to validate the feasibility of the ultrasonic tracking during autonomous manipulation, a commercial unit in air is modified to work with the robotic manipulator of SAUVIM. This experiment consists of pouring the content of a test-tube into a container. The system (test-tube seat and container) was prepared with a moving base, whose position and orientation were tracked by the ultrasonic sensor.
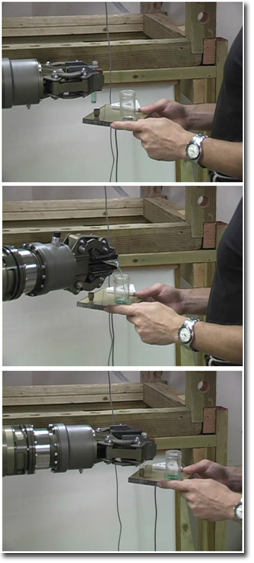
A video of the above experiment is availabe here.